La performance di un go-kart dipende da una serie di fattori che insieme determinano la velocità, la maneggevolezza e la sicurezza del veicolo. Componenti come il motore, i freni e le gomme giocano un ruolo cruciale, ma uno degli elementi spesso sottovalutati è la rigidezza del telaio.
Questa caratteristica è altrettanto fondamentale perché influisce direttamente sulla stabilità e sulla risposta del veicolo durante la guida. La rigidezza del telaio, se adeguatamente progettata, può fare la differenza tra una performance mediocre e una prestazione da campione. Un telaio rigido permette di mantenere una geometria costante del go-kart, assicurando che le ruote restino allineate correttamente durante la guida.
Photo: TB kart - IRK Promotion
Questo allineamento preciso è cruciale per evitare comportamenti imprevedibili del veicolo e per garantire che la forza motrice sia trasferita efficacemente dalla potenza del motore alle ruote. Inoltre, una maggiore rigidezza del telaio consente una migliore risposta ai comandi del pilota, rendendo il go-kart più reattivo nelle curve e durante le manovre ad alta velocità.
Per valutare la rigidezza del telaio, uno dei test più significativi è quello della rigidezza torsionale. Questo test misura quanto il telaio si deforma sotto carichi torsionali, simulando le sollecitazioni che il go-kart subisce nelle curve strette e durante le accelerazioni e frenate brusche. Il test inizia con il montaggio del telaio su una piattaforma di prova rigida, utilizzando supporti che permettono di applicare il carico torsionale in modo controllato. Il telaio è fissato saldamente in corrispondenza dei punti di montaggio principali e vengono installati sensori di deformazione in punti strategici per misurare le deformazioni risultanti.
Il carico torsionale viene applicato solitamente alle estremità del telaio, utilizzando bracci di leva collegati a pesi o dispositivi idraulici per un controllo preciso del momento torsionale. Il carico viene incrementato gradualmente, permettendo di osservare il comportamento del telaio sotto differenti livelli di stress. I sensori registrano le deformazioni e gli spostamenti del telaio in risposta al carico applicato, e questi dati vengono raccolti in tempo reale per individuare eventuali punti di cedimento o deformazione eccessiva.
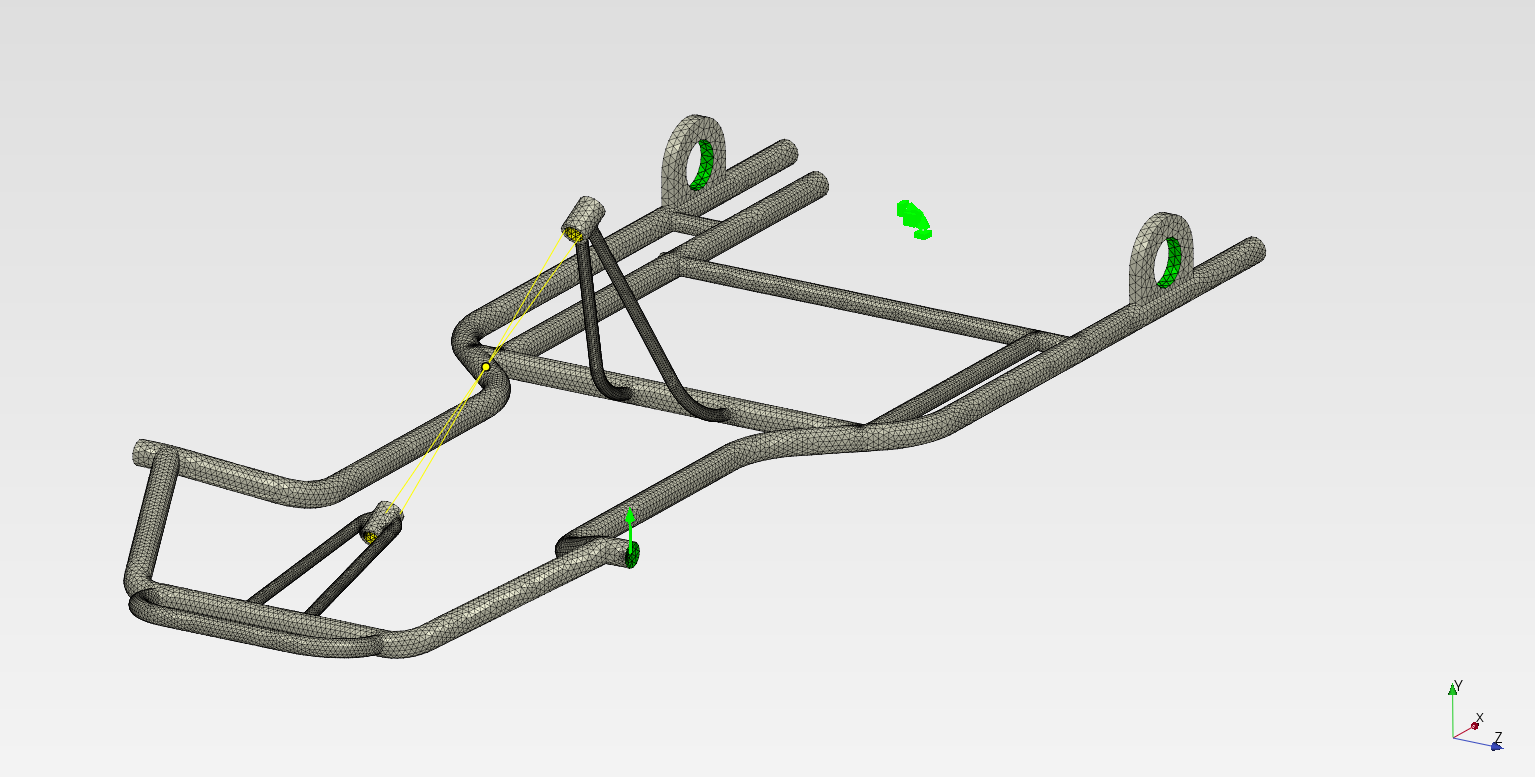
Attraverso le analisi FEM è possibile impostare lo stesso tipo di test in modo virtuale, bloccando le sedi degli assali posteriore e applicando uno spostamento imposto sull'asse verticale (Y) alla ruota anteriore, generando così la torsione del telaio.
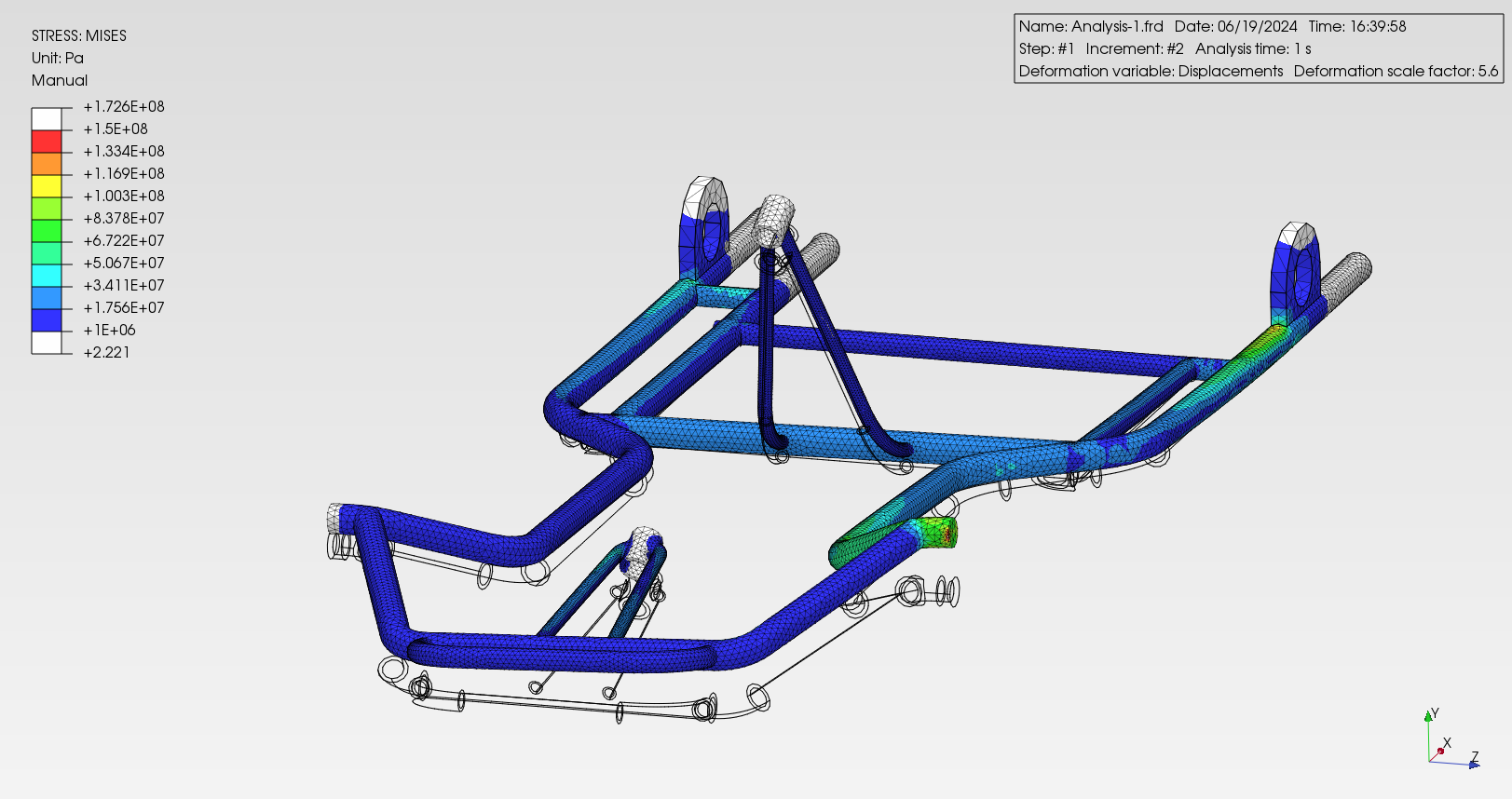
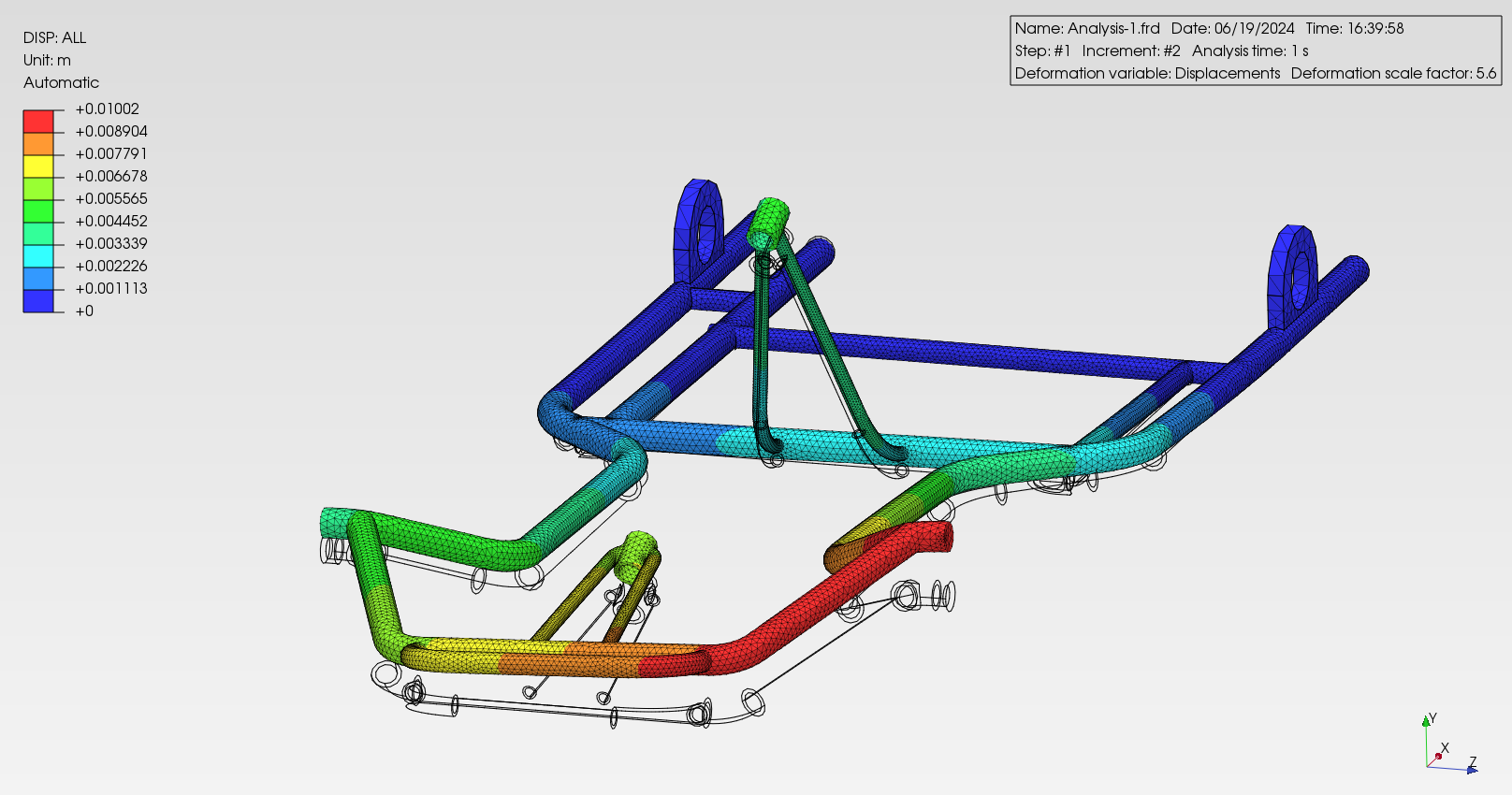
La rigidezza torsionale viene calcolata confrontando il momento torsionale applicato con l'angolo di torsione risultante, fornendo una misura diretta della rigidezza del telaio. I dati raccolti vengono analizzati per identificare le aree del telaio che mostrano eccessiva flessione o deformazione, utilizzati poi per ottimizzare il design del telaio. Di seguito, nell'esempio illustrato, i valori di tensione calcolati nel telaio per lo spostamento imposto.
Le analisi FEM permettono di simulare le sollecitazioni che il telaio subisce in diverse condizioni operative sia statiche sia dinamiche, identificando le aree critiche che potrebbero necessitare di rinforzi o modifiche progettuali. Questo tipo di analisi consente di ottimizzare il design del telaio, bilanciando rigidezza e peso, per ottenere il massimo delle prestazioni senza compromettere l'affidabilità.
I materiali iperelastici, noti anche comunemente con il nome di materiali elastomerici, sono materiali capaci di subire grandi deformazioni reversibili (quindi elastiche) senza subire danni permanenti o deformazioni plastiche. Proprio per l'elevata deformazione in campo elastico vengono definiti IPER elastici. I metodi di modellazione a materiale iperleastico sono comunemente utilizzati nelle analisi FEM quando è necessario modellare materiali come gomme e tessuti biologici.
"Perchè utilizzare un modello iperleastico? Non è possibile utilizzare la comune equazione di Hooke?"
L'equazione dell'elasticità dei materiali classici, secondo Hooke, prevede una relazione lineare tra sforzo e deformazione data dal modulo elastico E considerato come una costante.
σ= E∙ ε
Al contrario la caratteristica distintiva dei materiali iperelastici è una relazione non lineare tra sforzo e deformazione, descritta attraverso funzioni di energia di deformazione, pur restando all'interno di deformazioni reversibili, quindi "elastiche"
I modelli più utilizzati per descrivere il comportamento iperelastico sono i modelli di Neo-Hookean, Mooney-Rivlin e Ogden, i quali definiscono il comportamento meccanico dei materiali attraverso parametri specifici diversi dal modulo elastico. Le applicazioni dei modelli iperelastici alle analisi FEM permettono di simulare accuratamente il comportamento meccanico sotto carichi semplici o complessi e sono essenziali in settori come l'ingegneria biomedica, l'architettura e l'industria automobilistica.
I modelli iperelastici differiscono tra di loro principalmente nella complessità e nella capacità di descrivere il comportamento non lineare dei materiali elastomerici. A maggiore capacità di modellazione della risposta del materiale normalmente corrisponde una maggiore complessità del modello con maggiori parametri costitutivi. Di seguito i più diffusi:
Neo-Hookean
Descrizione: È il modello più semplice, utilizzando un solo parametro di elasticità.
Applicazioni: Adeguato per piccole deformazioni.
Equazione: La funzione di energia di deformazione dipende solo dal primo invariante di deformazione .
Mooney-Rivlin
Descrizione: Estende il modello Neo-Hookean includendo due parametri, e .
Applicazioni: Migliore per descrivere grandi deformazioni.
Equazione: La funzione di energia dipende sia dal primo che dal secondo invariante di deformazione e .
Ogden
Descrizione: Un modello molto complesso che utilizza più termini e parametri per descrivere il comportamento del materiale.
Applicazioni: Altamente preciso per materiali con comportamento non lineare complesso e grandi deformazioni.
Equazione: La funzione di energia dipende dai principali allungamenti invarianti, rendendolo molto versatile.
L'immagine sottostante mostra una curva di sforzo-deformazione per un materiale iperelastico. La curva rappresenta la relazione non lineare tra il sforzo applicato e la deformazione risultante nel materiale. Le curve iniziano a un valore basso di deformazione e sforzo e aumenta in modo non lineare, indicando che, a differenza dei materiali elastici lineari, i materiali iperelastici non seguono una proporzionalità diretta tra sforzo e deformazione. La pendenza della curva varia lungo il grafico, mostrando come il materiale iperelastico possa sostenere grandi deformazioni con un aumento graduale dello sforzo, riflettendo la sua capacità di allungarsi notevolmente prima di raggiungere il punto di rottura o di danneggiamento permanente.
"Hyperelastic Material Stress-Strain Curve" by Clancy214 is licensed under CC BY-SA 4.0 via Wikimedia Commons - Link.
Inoltre, l'immagine illustra come la forma della non linearità cambi in base al modello iperelastico utilizzato, evidenziando le diverse caratteristiche meccaniche che possono essere descritte con differenti funzioni di energia di deformazione, come i modelli di Neo-Hookean, Mooney-Rivlin e Ogden.
Riassumendo, i vari modelli possono essere così descritti:
Neo-Hookean: Semplice, un parametro, per piccole deformazioni.
Mooney-Rivlin: Due parametri, migliore per grandi deformazioni.
Oden: Molto complesso, altamente accurato per ampie deformazioni e comportamenti non lineari.
Nelle simulazioni di fluidodinamica computazionale (CFD), il dimensionamento della mesh è cruciale per ottenere convergenza e risultati affidabili. Le mesh per CFD richiedono una risoluzione adeguata principalmente vicino ai muri (wall-condition) per catturare accuratamente gli effetti dello strato limite. In OpenFOAM, come in molti altri software, uno degli approcci per dimensionare la mesh vicino alle pareti solide si basa sul concetto di Y+. Questo tutorial spiegherà come utilizzare Y+ per dimensionare correttamente la mesh in una simulazione CFD bilanciando tempi di calcolo e affidabilità.
Forse abbiamo esagerato con l'approssimazione della geometria reale?
Cos'è Y+?
Y+ è un parametro adimensionale che rappresenta la distanza dalla parete alla prima cella della mesh, in unità di lunghezze di scala dello strato limite viscoso. Prima di generare la mesh è quindi necessario un'idea preliminare della dimensione delle celle vicino alle pareti basata sull'Y+ che vogliamo ottenere per le condizioni al contorno che andremo a impostare. Valori tipici di Y+ per diversi modelli di turbolenza sono:
Per modelli con trattamento integrale dello strato limite (ad es. k-omega SST): Y+ ~ 1.
Per modelli che usano funzioni di parete (ad es. k-epsilon standard): Y+ compreso tra 30 e 300.
Y+ è definito come:
dove:
= velocità di attrito (m/s), calcolabile da
= sforzo di parete (Pa)
= distanza normale dalla parete alla prima cella della mesh (m)
= viscosità cinematica del fluido (m²/s),
Per calcolare , è spesso necessario stimare che dipende dallo sforzo di parete .
Esempio: Se hai un flusso d'aria (densità kg/m³, viscosità Pa·s) con uno sforzo di parete Pa e vuoi un valore di , la distanza dalla parete alla prima cella della mesh sarà:
Quindi, la distanza dalla parete alla prima cella della mesh dovrebbe essere di circa 0.694 mm per raggiungere un di 30.
Approssimare la velocità di attrito dalla velocità media del flusso.
Per calcolare Y+ utilizzando la velocità del fluido, è possibile adottare un approccio leggermente diverso. Y+ è definito in termini di velocità di attrito (), ma può essere strettamente correlato alla velocità media del flusso in alcune situazioni, specialmente in flussi turbolenti completamente sviluppati lungo superfici piane. Tuttavia, si deve tenere presente che questa correlazione può non essere precisa in tutti i casi, specialmente in geometrie complesse o in flussi non turbolenti.
La formula per Y+ rimane la stessa:
Per collegare la velocità di attrito alla velocità del fluido, si può utilizzare una relazione empirica o teorica basata sullo specifico caso di flusso. Ad esempio, in un canale o in un flusso turbolento lungo una piastra piana, la velocità di attrito può essere stimata come una frazione della velocità del flusso basata sul numero di Reynolds.
Una relazione approssimativa in tali casi è:
Dove:
= velocità media del flusso
= numero di Reynolds basato sulla lunghezza caratteristica
Questa è una stima molto approssimativa e dovrebbe essere usata con cautela. Per calcoli più accurati, è consigliato utilizzare i risultati di simulazioni precedenti o dati sperimentali per ottenere una stima più precisa di .
Calcolo del numero di Reynolds
Il numero di Reynolds è un parametro non dimensionale utilizzato nella meccanica dei fluidi per prevedere i pattern di flusso in diversi tipi di problemi fluidodinamici. È definito come:
dove:
= densità del fluido (kg/m³)
= velocità caratteristica del flusso (m/s)
= lunghezza caratteristica (m), ad esempio il diametro di un tubo o la lunghezza di un'ala
= viscosità dinamica del fluido (Pa·s)
Esempio: Se hai un flusso d'aria (densità kg/m³, viscosità Pa·s) sopra un'ala con una lunghezza caratteristica di 1 m e una velocità del flusso di 30 m/s, il numero di Reynolds sarà:
Esempio Conclusivo
Supponiamo di voler avere un valore di Y+ = 30 in un flusso d'aria con le seguenti proprietà:
Velocità media del flusso, m/s.
Viscosità cinematica dell'aria, m²/s.
Numero di Reynolds basato su una lunghezza caratteristica, .
Prima calcoliamo :
Ora usiamo la formula rielaborata di Y+ per trovare :
Quindi, per ottenere un valore di Y+ di 30, la distanza dalla parete alla prima cella della mesh dovrebbe essere circa 0.03 mm.
Ricorda che questi calcoli sono basati su stime e approssimazioni. La precisione può variare a seconda della complessità del flusso e della geometria specifica del caso in esame. In una simulazione CFD reale, potrebbero essere necessarie ulteriori iterazioni per ottimizzare la dimensione della mesh e raggiungere il valore desiderato di Y+.
Suggerimenti
Ora che hai capito la teoria alla base del dimensionamento della mesh per una simulazione di openFOAM ti suggerisco di utilizzare il pratico calcolatore automatico sviluppato da CFDFEASERVICE per l'utilizzo con snappyHexMesh di openFOAM.
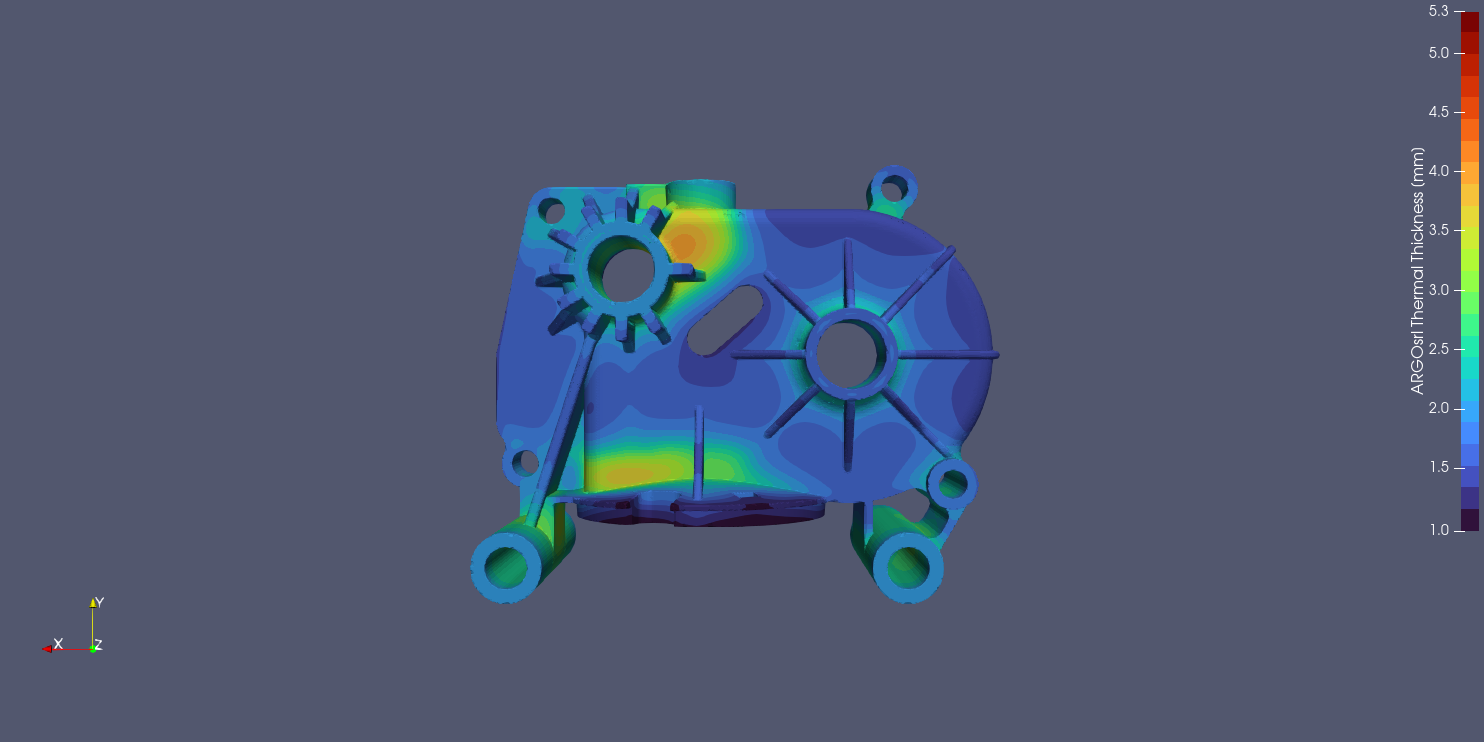
Quando agiamo sul design del componente agiamo indirettamente sul suo comportamento in fase fusa. Dobbiamo innanzitutto evitare di generare componenti troppo sbilanciati termicamente e difficili da alimentare. Spesso i vincoli meccanici portano a disegnare forme e volumi che complicano la vita a chi deve produrre il pezzo per stampaggio a iniezione.
Regola per un design "senza-difetti": gli spessori effettivi dei componenti devono essere attentamente tenuti sotto controllo per evitare zone termicamente massive rispetto al resto del pezzo. Queste zone saranno le ultime a raffreddarsi e, quando tutto il materiale circondato sarà ormai solidificato, non ci sarà più modo di compensare i ritiri volumetrici, generando così difetti comuni quali risucchi e distorsioni.
Ecco come una geometria apparentemente poco complessa può comunque nascondere insidie e difetti. Abbiamo messo alla prova BestGate, il tool di MoldApp sviluppato da ARGO e CFDFEASERVICE, e abbiamo individuato almeno due macro-zone termicamente sbilanciate, ad alto rischio risucchi e deformazioni incontrollate.
La prevenzione di difetti e distorsioni nello stampaggio a iniezione inizia già dalla progettazione. Alla grande attenzione nel progettare un componente in grado di resistere alle sollecitazioni meccaniche durante il ciclo vita, spesso non viene affiancata la stessa sensibilità circa la “stampabilità”. Non sempre questa disattenzione può essere corretta più a valle in fase di realizzazione stampo, in ogni caso con incremento costi e tempi, con conseguenti elevate percentuali di scarto e continue modifiche stampo.
In ARGO abbiamo voluto sviluppare un metodo CAE intuitivo per quantificare la “stampabilità” di un pezzo, fornendo informazioni:
al progettista in fase di design per ridurre fin da subito i costi di produzione
a tutta la supply-chain (stampisti e stampatori) in fase di quotazione per evitare spiacevoli sorprese su pezzi solo all’apparenza semplici.
Nel processo di stampaggio a iniezione delle materie plastiche le deformazioni sul pezzo sono uno dei principali difetti che si possono riscontrare e che possono portare allo scarto dei componenti.
Perchè un pezzo iniettato si deforma ?
Un pezzo in materiale plastico (polimerico) stampato a iniezione passa da una fase liquida ad alta temperatura ad una fase solida a bassa temperatura. Tale passaggio comporta variazioni del volume specifico del materiale e, di conseguenza, una variazione del volume finale del nostro componente.
Nel caso ideale, e non fisico, di un componente che si raffredda in maniera perfettamente omogenea in tutto il suo volume otterremmo semplicemente un pezzo scalato a dimensioni inferiori senza alcun stress residuo o deformazione visibile.
Se il raffreddamento fosse idealmente omogeneo il raffreddamento si comporterebbe come una semplice operazione di scala (nel video SALOME_MECA)
Ovviamente questo non avviene nello stampaggio a iniezione delle materie plastiche. Cos'è che quindi genera le deformazioni nello stampaggio?
Gradienti di temperatura, la forza motrice delle deformazioni di un componente stampato.
La prima forza agente, nello stampaggio a iniezione, sono i gradienti di temperatura. In uno stampo per stampaggio a iniezione il pezzo può raffreddarsi solo tramite la parete dello stampo, e il calore fluisce dal cuore caldo della sezione del componente verso le pareti stampo, generando così gradienti di temperatura più o meno intensi che comporteranno ritiri volumetrici diversi in diversi punti del materiale.
Come controllare i ritiri e le deformazioni?
La gestione dei gradienti nello stampaggio a iniezione può essere divisa in due condizioni semplificate:
in fase fusa
in fase solida
In fase fusa è essenziale sfruttare il vantaggio di un materiale polimerico che può effettivamente scorrere e quindi andare a compensare i vuoti che si generano per il ritiro con nuovo materiale fuso.
Per ottimizzare i ritiri in questa fase dello stampaggio a iniezione è opportuno intervenire sul mantenimento in pressione e sul posizionamento del punto d'iniezione.
In fase solida non possiamo più aggiungere altro materiale a compensare i ritiri volumetrici, diventa cruciale quindi agire sugli spessori del componente e sull'omogeneità di raffreddamento attraverso la progettazione del circuito di raffreddamento dello stampo per materie plastiche.
Nel prossimo articolo sullo stampaggio a iniezione vedremo come ottimizzare i ritiri agendo sulle condizioni in fase fusa.
openInjMoldSim è il solver per openFOAM v7/6/5 per la simulazione dello stampaggio ad iniezione di polimeri. Come openFOAM è distribuito secondo licenza GPL ed è liberamente scaricabile dal repository:
$ cd /opt/openfoam7/applications/solvers/multiphase/openInjMoldSim
Si dichiara quindi che vogliamo che il solver venga compilato direttamente insieme agli altri solver di openfoam7 (FOAM_APPBIN) modificando una stringa all'interno di Make/files:
$ sudo gedit /Make/files
e cambiamo la riga:
EXE = $(FOAM_USER_APPBIN)/openInjMoldSim
in
EXE = $(FOAM_APPBIN)/openInjMoldSim
Salviamo e chiudiamo "files" , da terminale quindi eseguiamo questa sequenza di comandi
$ wclean
$ sudo bash
$ wmake
Al termine della compilazione avrete installato openInjMoldSim in OF7.
ENGLISH TUTORIAL
openInjMoldSim is the openFOAM sovler for injection molding analysis, it is opensource and free and you can get it from:
$ cd /opt/openfoam7/applications/solvers/multiphase/openInjMoldSim
Now it's time to tell the compiler that we want the solver in the same folder where other solvers are stored in openfoam7 (FOAM_APPBIN), we can do this just by modifying a line in the file Make/files in openInjMoldSim
$ sudo gedit /Make/files
changing the line
EXE = $(FOAM_USER_APPBIN)/openInjMoldSim
to
EXE = $(FOAM_APPBIN)/openInjMoldSim
save and close gedit , now from terminal:
$ wclean
$ sudo bash
$ wmake
At the end the solver will be ready to use in your openfoam7 installation.
Vuoi approfondire le tematiche presentate nelle nostre simulazioni o nei casi studio? Contattaci liberamente per una discussione dettagliata o per qualsiasi domanda tu abbia.
Siamo pronti a offrirti il nostro supporto e la nostra esperienza.
Utilizziamo i cookie sul nostro sito Web. Alcuni di essi sono essenziali per il funzionamento del sito, mentre altri ci aiutano a migliorare questo sito e l'esperienza dell'utente (cookie di tracciamento). Puoi decidere tu stesso se consentire o meno i cookie. Ti preghiamo di notare che se li rifiuti, potresti non essere in grado di utilizzare tutte le funzionalità del sito.